ワークロイドの開発思想
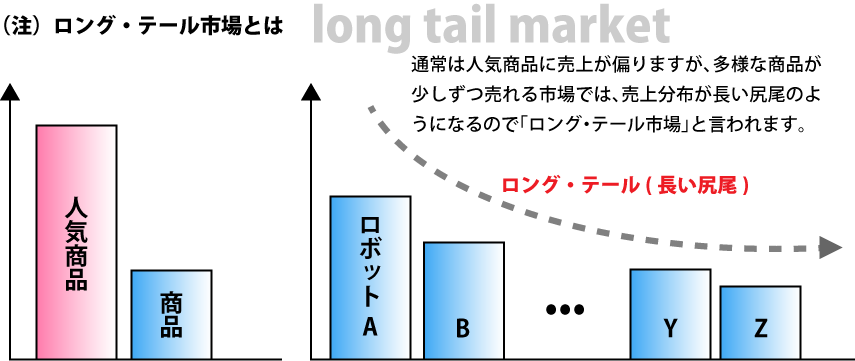
ワークロイドは、“労働人口の減少に伴う労働の代替を求める”ロボット・ユーザーを対象とします。そして、そのようなロボット・ユーザーの多くは、高額な開発費用や導入費用の負担が難しい個人や中小企業が想定されます。そして、ワークロイドのロボット・ユーザーが必要とするシーンは多様で、それぞれに対応した様々なロボットが必要とされます。そのため、それぞれ必要とされるロボットの数量は多くなくとも、その多様性ゆえに全体では大きな需要となる「ロング・テール市場」(注)に基づく開発思想が必要となります。
ワークロイドのロボット・ユーザーの負担能力を許容しながら「ロング・テール市場」に対応した多様なロボットを提供するには、ロボットの単機能化、再利用可能なロボット部品の共通化、オープン・ソースの活用が有効だと考えられます。
☑ロボットの単機能化
一つのハイスペックなロボットではなく、単機能のロボットが労働の種類毎に組み合わせて協調して労働を提供します。ロボット同士の連携作業や特定作業の実施方法などの高度な情報処理は、ロボット本体ではなく、クラウド上に配置した AI によって、通信を介して行います。
☑コンポーネントの共通化・共有化
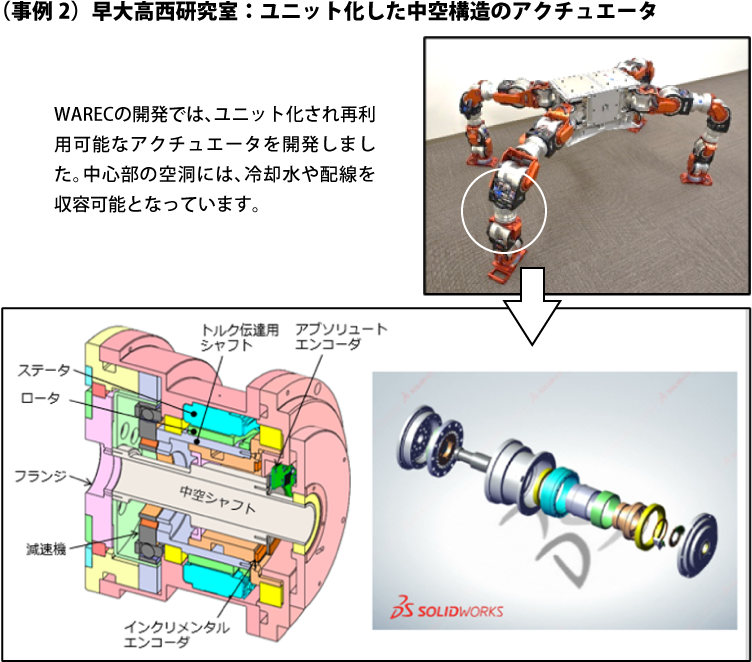
コントローラ(脳)、アクチュエータ(筋肉)、センサー(感覚器)を共通部品化して再利用可能にします。ロボットの知識である AI は、事前に作業毎にセットし、クラウド上に配置し、ロボット同士が通信を通して共有します。学習結果もクラウド上の AI を通してロボット全体で共有します。
☑オープン・ソースの有効活用
ロボット・システムのミドルウェアである ROS(Robot Operation System)、開発環境を仮想化するソフトウェア GAZEBO など、オープン・ソースを活用することで開発環境を共通化・効率化して開発費用を抑えます。